|
I'm an incoming M.S. student at the Robotics Institute at Carnegie Mellon University. I recently graduated from the University of Rochester with a B.S. in Computer Science and a B.A. in business. I was advised by Professor Thomas Howard and Professor Yuhao Zhu. |

|
|
|
|
I am interested in applications of machine learning to robotics. |
 |
Samuel Triest Thesis at University of Rochester, 2020 We observe that in practice, many unsupervised RL environments have priors which skew the distribution of desirable states to achieve. To address these this, we propose augmenting a mutual information-based unsupervised RL algorithm with environment-specific priors in order to obtain a more focused set of skills to use for learning tasks at test-time. We also demonstrate improved performance on downstream tasks when incorporating a prior. |
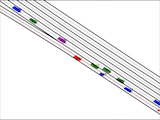 |
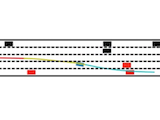
Samuel Triest, Adam Villaflor, John M. Dolan Intelligent Vehicles Symposium, 2020 Learning-based approaches to autonomous vehicle behaviors can be valuable in scenarios with high degrees of interaction. Using a hierarchical approach with planned low-level actions and a high-level policy learned via deep RL, we achieve SOTA performance on a highway merging task with trajectories extracted from human drivers. |
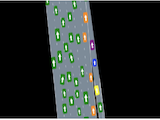 |
Samuel Triest, Adam Villaflor, John M. Dolan RISS Working Papers, 2019 Learning-based approaches to autonomous vehicle behaviors can be valuable in scenarios with high degrees of interaction. We use Generative Adversarial Imitation Learning and controller-based priors to learn a controller that merges onto highways. We validate our approach using real highway data. |

|
Samuel Triest, Daniel Nikolov, Jannick Rolland, Yuhao Zhu Workshop on Approximate Computing, 2019 We formulate the design of domain-specific cameras as an optimization problem spanning optical elements, hardware, and deep neural networks. |
|
|
|
Work I completed from extracurriculars and independent studies. |
|
|
Worked as a part of the Robotics Club at the University of Rochester to design a series of workshops meant to introduce new students to robotics by designing a simple arm and writing the algorithms to move it intelligently. Worked specifically in designing the workshops on simulation and planning. |
|
|
We describe a DSL for parallel graph algorithms via highly composable, parallel graph primitives. We demonstrate that these primitives are robust enough to instantiate many SOTA parallel graph algorithms. |
|
|
Work done as a part of the U of R Robotics club where we designed a 6-DOF arm and implemented several control algorithms for it, such as inverse kinematics and probabilistic roadmaps. |